
Events and Seminars
Past Events
May 2014
Max Donelan of Simon Fraser University will be presenting the lecture “Bionic Knees and Elephant Nerves” on Thursday, May 1, 2014 at 4pm in the 2040 Valley Life Sciences Building. Please click here for the flier.
 This is a talk in two parts. First, I will describe the research underlying our bionic energy harvester—a device that unobtrusively and perpetually captures biomechanical energy from walking and converts it to electricity to power portable devices. Unlike conventional human-powered generators that use positive muscle work, this technology assists muscles in performing negative work, analogous to regenerative braking in hybrid cars, where energy normally dissipated during braking drives a generator instead. In the second half of my talk, I will describe our efforts towards understanding the scaling of sensorimotor control—research that involves measuring reflex and nerve properties in animals ranging in size from shrews to elephants. This research has led to some surprising findings including that the maximum speed of nerve fibres is size independent—making for very long conduction delays in large animals—and that the elephant’s largest nerve fibres are about the same size as those in a shrew.
This is a talk in two parts. First, I will describe the research underlying our bionic energy harvester—a device that unobtrusively and perpetually captures biomechanical energy from walking and converts it to electricity to power portable devices. Unlike conventional human-powered generators that use positive muscle work, this technology assists muscles in performing negative work, analogous to regenerative braking in hybrid cars, where energy normally dissipated during braking drives a generator instead. In the second half of my talk, I will describe our efforts towards understanding the scaling of sensorimotor control—research that involves measuring reflex and nerve properties in animals ranging in size from shrews to elephants. This research has led to some surprising findings including that the maximum speed of nerve fibres is size independent—making for very long conduction delays in large animals—and that the elephant’s largest nerve fibres are about the same size as those in a shrew.
April 2014
Stacey Combes of Harvard University will be presenting the lecture “Ecomechanics of insect flight: Hunting dragonflies and foraging bees in a complex world” on Thursday, April 17, 2014 at 4pm in the 2040 Valley Life Sciences Building. Please click here for the flier.
 Flying insects perform many of the behaviors most important to their fitness while in the air, including foraging and prey capture, predator evasion, competition, and mating. These behaviors typically take place within complex, unpredictable environments, where targets move erratically or evasively, solid obstacles loom at every turn, and the air swirls and gusts in inconsistent patterns. Our work focuses on understanding insect flight mechanics in the context of interactions with both the biotic and abiotic environments, including with other flying insects, with plants, and with natural, unsteady air flows. I will discuss how flight mechanics plays a role in biotic interactions between hunting dragonflies and their prey. I will also present recent results concerning abiotic interactions between foraging bees and their physical environment, including studies on bees maneuvering through obstacles, wing damage resulting from collisions, and the implications of this damage for flight performance. Finally, I will discuss how unsteady, structured flow and turbulence affect bee flight stability, and present ongoing experiments aimed at understanding how habitat alteration and changes in air flow may affect landscape-scale movement patterns of foraging bees.
Flying insects perform many of the behaviors most important to their fitness while in the air, including foraging and prey capture, predator evasion, competition, and mating. These behaviors typically take place within complex, unpredictable environments, where targets move erratically or evasively, solid obstacles loom at every turn, and the air swirls and gusts in inconsistent patterns. Our work focuses on understanding insect flight mechanics in the context of interactions with both the biotic and abiotic environments, including with other flying insects, with plants, and with natural, unsteady air flows. I will discuss how flight mechanics plays a role in biotic interactions between hunting dragonflies and their prey. I will also present recent results concerning abiotic interactions between foraging bees and their physical environment, including studies on bees maneuvering through obstacles, wing damage resulting from collisions, and the implications of this damage for flight performance. Finally, I will discuss how unsteady, structured flow and turbulence affect bee flight stability, and present ongoing experiments aimed at understanding how habitat alteration and changes in air flow may affect landscape-scale movement patterns of foraging bees.
March 2014
Frank Fish of West Chester University will be presenting the lecture “Advances in technologies based on marine megafauna” on Thursday, April 10, 2014 at 4pm in the 2040 Valley Life Sciences Building. Please click here for the flier.

It has been a long-standing idea that new technologies can be developed from nature. Because biological designs resulted from the evolutionary Darwinian process of “natural selection”, it is considered that animals have already performed the “cost-benefit-analysis”, optimizing particular designs for specific functions. The biomimetic approach seeks to incorporate designs based on biological organisms into engineered technologies.
Optimization of energy by aquatic megafauna requires adaptations that control hydrodynamic flow over the body to reduce drag, and improve thrust production and efficiency. Streamlining of the body and appendages minimizes drag. These highly derived aquatic animals have body shapes close to the optimal hydrodynamic design for drag reduction. Oscillations of the flukes and fins, which are hydrofoils, generate thrust throughout the stroke cycle and maintain a high propulsive efficiency. This high efficiency is dependent on the passive, self-adjusting spanwise and chordwise bending of the propulsive structure and on the control of vorticity. The use of bubble particle image velocimetry (BPIV) on swimming bottlenose dolphins (Tursiops truncatus) was used to display this vorticity. BPIV showed that dolphins could produce high amounts of thrust to overcome the drag experienced by the oscillating body without incurring special drag reduction mechanisms. Control of vorticity to enhance locomotor performance also is demonstrated in the humpback whale (Megaptera novaeangliae). This whale is exceptional among the baleen whales in its ability to undertake acrobatic underwater maneuvers to catch prey. In order to execute these maneuvers, such as banking and turning, humpback whales utilize extremely mobile, wing-like flippers. The humpback whale flipper is unique because of the presence of large tubercles along the leading edge, which gives this surface a scalloped appearance. The position, size and number of tubercles suggest analogues with specialized leading edge control devices associated with improvements in hydrodynamic performance on lifting surfaces. Examinations using various computational fluid dynamic models and wind tunnel testing have demonstrated that the tubercles modify the flow pattern around the flipper and postpone stall with increasing angles of attack. The tubercles function to produce vortical flows over the surface of the flipper and control lift characteristics at high angles of attack, where stall would occur. Emulation of the manta ray (Manta birostris) by the development of a robotic system has lead to a greater understanding of how the animal can swim and maneuver with high efficiency.
The potential benefits from biological innovations applied to engineered systems operating in fluids are high speeds, vorticity control, reduced detection, energy economy, and enhanced maneuverability. Adaptations from marine animals demonstrate potential utility in the development of biomimetic products.
Stefan Schaal of Max-Planck-Institute for Intelligent Systems & University of Southern California will be presenting the lecture “Learning Motor Skills: From Movement Primitives to Associative Skill Memories” on March 31, 2014 at 4pm in the Hewlett Packard Auditorium (306 Soda).
 Controlling a complex movement system requires making perceptual and control decisions at every moment of time, and learning and adaptation to improve the system’s performance. High dimensional continuous state-action spaces still pose significant scaling problems for learning algorithms to find (approximately) optimal solutions, and appropriate task descriptions or cost functions require a large amount of human guidance. In order to address autonomous skillful movement generation in complex robot and task scenarios, we have been working on a variety of subproblems to facilitate robust task achievement. Among these topics are general representations for movement in form of movement primitives, trajectory-based reinforcement learning with path integral reinforcement learning, and inverse reinforcement learning to extract the “intent” of observed behavior. However, this “action centric” view of skill acquisition needs to be extended with a stronger perceptual component, as, in the end, it is the entire perception-action-learning loop that could be considered the key element to address, rather than isolated components of this loop. In some tentative initial research, we have been exploring Associative Skill Memories, i.e., the simple idea to start memorizing all sensory events and their statistics together with each movement skill. This concepts opens a wide spectrum of adding predictive, corrective, and switching behaviors in motor skills, and may create an interesting foundation to automatically generate the graphs underlying complex sequential motor skills. Our research results will be illustrated in various experiments with complex anthropomorphic robot systems and also some results from behavioral experiments.
Controlling a complex movement system requires making perceptual and control decisions at every moment of time, and learning and adaptation to improve the system’s performance. High dimensional continuous state-action spaces still pose significant scaling problems for learning algorithms to find (approximately) optimal solutions, and appropriate task descriptions or cost functions require a large amount of human guidance. In order to address autonomous skillful movement generation in complex robot and task scenarios, we have been working on a variety of subproblems to facilitate robust task achievement. Among these topics are general representations for movement in form of movement primitives, trajectory-based reinforcement learning with path integral reinforcement learning, and inverse reinforcement learning to extract the “intent” of observed behavior. However, this “action centric” view of skill acquisition needs to be extended with a stronger perceptual component, as, in the end, it is the entire perception-action-learning loop that could be considered the key element to address, rather than isolated components of this loop. In some tentative initial research, we have been exploring Associative Skill Memories, i.e., the simple idea to start memorizing all sensory events and their statistics together with each movement skill. This concepts opens a wide spectrum of adding predictive, corrective, and switching behaviors in motor skills, and may create an interesting foundation to automatically generate the graphs underlying complex sequential motor skills. Our research results will be illustrated in various experiments with complex anthropomorphic robot systems and also some results from behavioral experiments.
Noah Cowan of Johns Hopkins University will be presenting the lecture “Encoding 3D Spatial Orientation in the Brain ” on Monday, March 3, 2014 at 4pm in the Hewlett Packard Auditorium (306 Soda). Please click here for the flier.
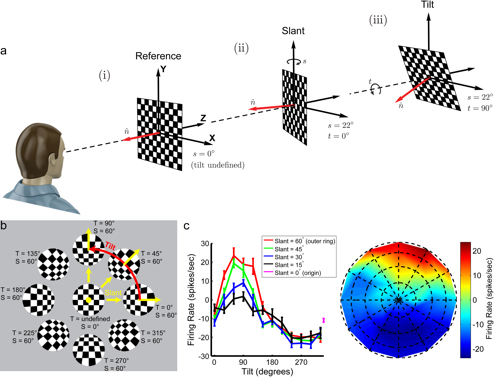 The visual encoding of 3D object orientation is critical for artificial and natural systems. Where and how the brain visually encodes 3D object orientation remains unknown, but prior studies suggest the caudal intraparietal area (CIP) may be involved. Here, we develop rigorous analytical methods for quantifying 3D orientation tuning curves, and use these tools to the study the neural coding of surface orientation. Specifically, we show that single neurons in area CIP of the rhesus macaque jointly encode the slant and tilt of a planar surface, and that across the population, the distribution of preferred slant-tilts is not statistically different from uniform. This suggests that all slant-tilt combinations are equally represented in area CIP. Furthermore, some CIP neurons are found to also represent the third rotational degree of freedom that determines the orientation of the image pattern on the planar surface. Together, the present results suggest that CIP is a critical neural locus for the encoding of all three rotational degrees of freedom specifying an object’s 3D spatial orientation. This is joint work with Ari Rosenberg and Dora Angelaki at the Baylor College of Medicine.
The visual encoding of 3D object orientation is critical for artificial and natural systems. Where and how the brain visually encodes 3D object orientation remains unknown, but prior studies suggest the caudal intraparietal area (CIP) may be involved. Here, we develop rigorous analytical methods for quantifying 3D orientation tuning curves, and use these tools to the study the neural coding of surface orientation. Specifically, we show that single neurons in area CIP of the rhesus macaque jointly encode the slant and tilt of a planar surface, and that across the population, the distribution of preferred slant-tilts is not statistically different from uniform. This suggests that all slant-tilt combinations are equally represented in area CIP. Furthermore, some CIP neurons are found to also represent the third rotational degree of freedom that determines the orientation of the image pattern on the planar surface. Together, the present results suggest that CIP is a critical neural locus for the encoding of all three rotational degrees of freedom specifying an object’s 3D spatial orientation. This is joint work with Ari Rosenberg and Dora Angelaki at the Baylor College of Medicine.
December 2013
Sarah Bergbreiter of the University of Maryland will be presenting the lecture “Tiny leaps for robot kind: combining microfabrication and robotics” on Wednesday, December 4, 2013 at 4pm in the Hewlett Packard Auditorium (306 Soda). Please click here for the flier.
 Research on mobile microrobots has been ongoing for the last 20 years, but the few robots that have walked have done so at slow speeds on smooth silicon wafers. However, ants can move at speeds over 40 body lengths/second on surfaces from picnic tables to front lawns. What challenges do we still need to tackle for microrobots to achieve this incredible mobility? This talk will discuss some of the mechanisms and motors we have designed and fabricated to enable robot mobility at the insect size scale as well as the use of microfabrication to improve larger robots. Mechanisms and sensors utilize new microfabrication processes to incorporate materials with widely varying moduli and functionality for more complexity in smaller packages. Actuators are designed to provide significant improvements in force density, efficiency and robustness over previous microactuators. Results include a 4mm jumping mechanism that can be launched approximately 35 cm straight up as well as a 300mg robot that jumps 8 cm with on-board power, sensing, actuation and control.
Research on mobile microrobots has been ongoing for the last 20 years, but the few robots that have walked have done so at slow speeds on smooth silicon wafers. However, ants can move at speeds over 40 body lengths/second on surfaces from picnic tables to front lawns. What challenges do we still need to tackle for microrobots to achieve this incredible mobility? This talk will discuss some of the mechanisms and motors we have designed and fabricated to enable robot mobility at the insect size scale as well as the use of microfabrication to improve larger robots. Mechanisms and sensors utilize new microfabrication processes to incorporate materials with widely varying moduli and functionality for more complexity in smaller packages. Actuators are designed to provide significant improvements in force density, efficiency and robustness over previous microactuators. Results include a 4mm jumping mechanism that can be launched approximately 35 cm straight up as well as a 300mg robot that jumps 8 cm with on-board power, sensing, actuation and control.
April 5, 2013: Biomechanics Seminar
Vytas SunSpiral, NASA Ames Research Center: 3.30PM
Location: 2063 Valley Life Sciences Building, UC Berkeley
Click here to view / download the flier.
Dynamic Tensegrities: Foundation for Motion and Thought . There is a fundamental connection between understanding our daily human experience and understanding how we move. Our brains exist to coordinate motion, so if we wish to understand how we think, feel, and relate to others, we should start by understanding how we move. The control of human and robotic motion is intimately tied to the structure that is being moved, and emerging theories of vertebrate physiology are overturning the traditional bone-centric model of the body in favor of a fascia-centric model where the primary load paths are in the continuous tension network of the soft-tissue. Tensegrity structures distribute forces globally through a continuous tension network while their compression elements do not touch or pass compressive loads to each other. They have many physical properties, such as high strength to weight and multi-path force distribution, which make them ideally suited for robust motion through dynamic natural settings, yet pose new challenges for controls.
This talk will discuss the unique properties of tensegrity structures and how they appear to be a foundational part of our bodies and how we move. Challenges in controlling tensegrities will be discussed, including thoughts on how they may be especially appropriate for neurologically inspired Central Pattern Generator (CPG) based oscillatory control networks, enabling a natural coupling from controller to structure to environment. The talk will include an overview of current research into dynamic tensegrity structures, both physical robots and physics based simulations, focusing on robust mobility.
 |
March 1, 2013: CiBER-IGERT Seminar Series, co-hosted by the Biomechanics Seminar SeriesJ. Sean Humbert, University of Maryland: 3:30pmLocation: 4110 Valley Life Sciences Building, UC BerkeleyClick here to view / download the flier.Sensorimotor Integration and Control at Insect Scales. Control architectures for nature’s small, agile flyers exhibit substantial differences from their engineered counterparts. For instance, latency is minimized by neurons that spatially weight across non-orthogonal arrays of sensors as opposed to traditional temporal filtering of small numbers of orthogonally arranged sensors to achieve signal to noise improvements. In this talk I will discuss several of these distinctions in the context of distillable solutions for small-scale engineered systems including: directionality and observability properties of insect sensory structures such as the compound eye; analysis of high speed videography of insects in free flight and reduced order models of flapping flight dynamics to understand controllability properties; implications for efficient coupling of sensing and actuation; and hardware implementations and demonstrations of insect-inspired sensorimotor architectures. |
 |
Feb. 20, 2013: CiBER-IGERT Seminar Series, co-hosted by the EECS ColloquiumSangbae Kim, Massachusetts Institute of Technology: 4:00pm [Refreshments at 3:30pm]Location: 306 Soda Hall (HP Auditorium), UC BerkeleyClick hereto view / download the flier.Toward highly dynamic locomotion : actuation, structure and control of the MIT cheetah robot. Robot designers are increasingly searching for ideas from biology. The talk will introduce such bio-inspired robots that embody the hypothesized principles from the insights obtained by animal studies. Through these examples, the intricate processes of design principle extraction will be discussed. Current research in the MIT biomimetics lab is centered on the development of a cheetah-inspired running robot. Three major associated research thrusts are optimum actuator design, biotensegrity structure design, and the impluse-based control architecture for stable galloping control. Each research component is guided by biomechanics of runners such as dogs and cheetahs capable of the fast traverse on rough and unstructured terrains. |
 |
Nov. 8, 2012: CiBER-IGERT Seminar SeriesJohn O. Dabiri, Caltech UniversityTime: 4:00pmLocation: 2040 Valley Life Sciences Building, UC BerkeleyClick hereto view / download the flier. |
 |
May 5, 2008: Monthly Seminar Series Helen Greiner, iRobot Corp.Click here for more information. |
 |
April 15, 2008: CiBER Industry Day Gecko ResearchClick here for more information, photos and presentations. |
 |
March 3, 2008: Monthly Seminar Series Marc Raibert, Boston Dynamics, Inc.Click here for more information. |
SeminarsSeminar in BiomechanicsIntegrative Biology (INTEGBI) 232 [2 units] Course Format: Two hours of seminar per week. |
|
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).


{kind=link}