



PNAS Cockroach Wedging
Cockroach inspires robot that squeezes through cracks Full Story: http://news.berkeley.edu
PUBLICITY INFORMATION FOR: Kaushik Jayaram, Robert J. Full (2016) Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot. Proceedings of the National Academy of Sciences, doi:10.1073/pnas.1514591113
THIS IS A PRIVATE WEBSITE. All information is embargoed with immediate effect until February 8, 2016 at 3 PM EST. Any access to this information is logged.
SHOULD YOU HAVE REACHED THIS WEBSITE BY ACCIDENT PLEASE CONTACT pauline@berkeley.edu.
Please note: The content of any press release and related material is embargoed with immediate effect until February 8, 2016 at 3 PM EST. For more information, see embargo policy of PNAS http://www.pnas.org/site/media/journalist.xhtml. The paper will be published online and will be citable via http://www.pnas.org/content/early/2016/02/04/1514591113.
High Resolution Cover & Figures
Contact Information for Comments
Authors
Kaushik Jayaram. Department of Integrative Biology, University of California, Berkeley, California 94720-3200, USA. Phone ++1 510 643 5183; Current address: School of Engineering and Applied Sciences, Harvard University, Cambridge, MA. e-mail: kaushikj@berkeley.edu, kjayaram@seas.harvard.edu. kaushikjayaram.com
Robert Full. Department of Integrative Biology, University of California at Berkeley, CA 94720-3140. Phone ++1 510 642 9896 (office) or ++510-332-7484 (mobile) e-mail: rjfull@berkeley.edu
Center for Interdisciplinary Bio-inspiration in Education and Research Visit CiBER Center for Learning from Nature
UC Berkeley’s PolyPEDAL Lab Visit
ALL GRAPHICAL MATERIAL (movies, images) IS COPYRIGHTED AND MAY BE USED FOR NEWS PURPOSES ONLY WITH APPROPRIATE CREDIT. ALL MATERIAL FROM THE PNAS ARTICLE SHOULD BE CREDITED AS COPYRIGHT PNAS 2016. ALL OTHER MATERIAL SHOULD BE CREDITED AS “Courtesy of PolyPEDAL Lab” WITH PHOTO CREDIT IF INCLUDED.”
Figures from Paper
- Figure 1
COPYRIGHT PNAS 2016. To view Figure 1 as a full-size jpg, please click on the image above.

- Figure 2
COPYRIGHT PNAS 2016. To view Figure 2 as a full-size jpg, please click on the image above.
- Figure 3
COPYRIGHT PNAS 2016. To view Figure 3 as a full-size jpg, please click on the image above.
- Figure 4
COPYRIGHT PNAS 2016. To view Figure 4 as a full-size jpg, please click on the image above.

- Figure 5
COPYRIGHT PNAS 2016. To view Figure 5 as a full-size jpg, please click on the image above.
- Supplementary Figure 1
COPYRIGHT PNAS 2016. To view Supplementary Figure 1 as a full-size jpg, please click on the image above.
Movies from Paper with Compilation of All
Supplementary Movie 2 Full_Video_s1
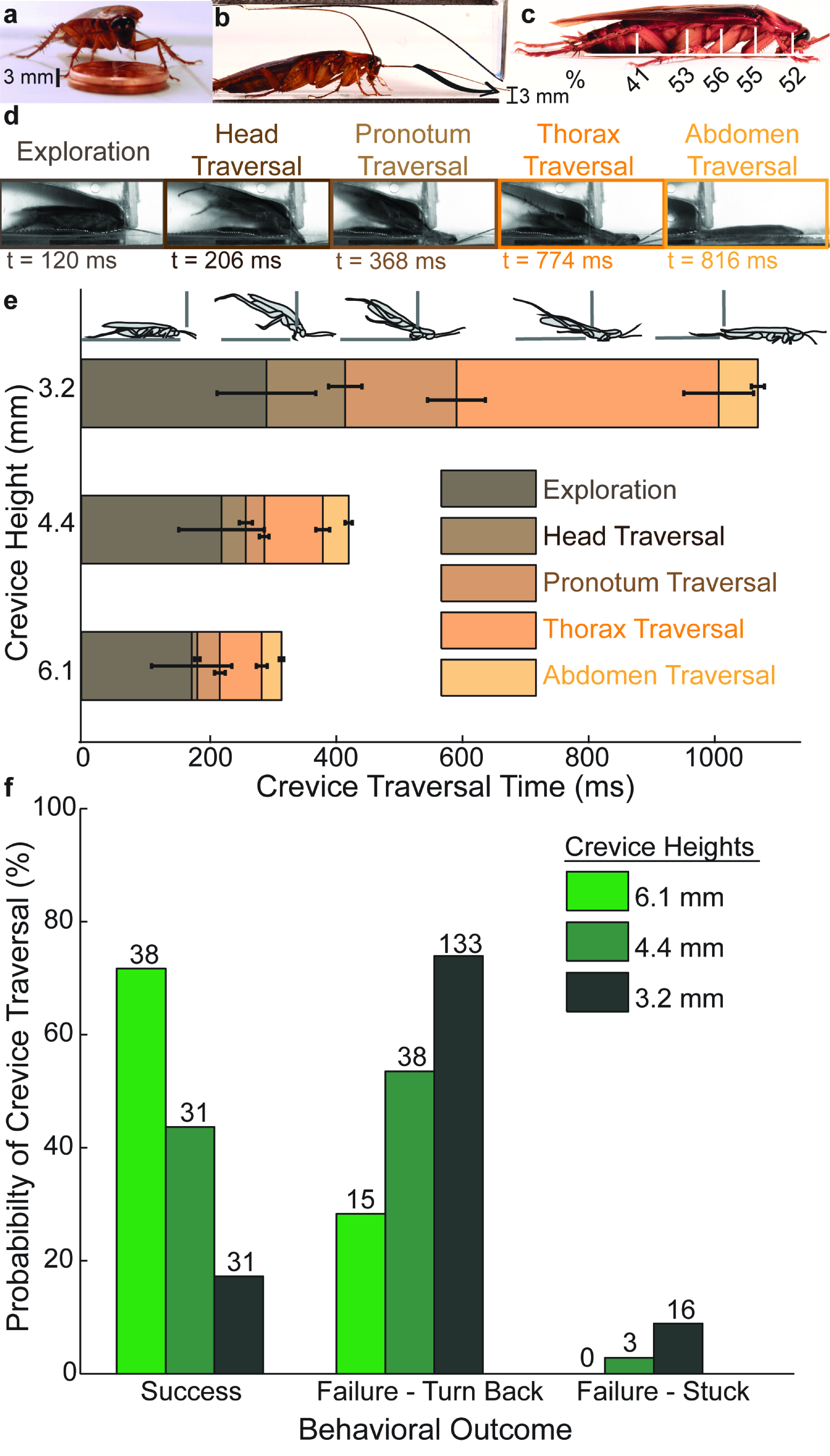
A side view of an American cockroach, P. americana, traversal a 3 mm crevice. Playback sequences are real-time and 10× slowed.
Supplementary Movie 2 Full_Video_s2
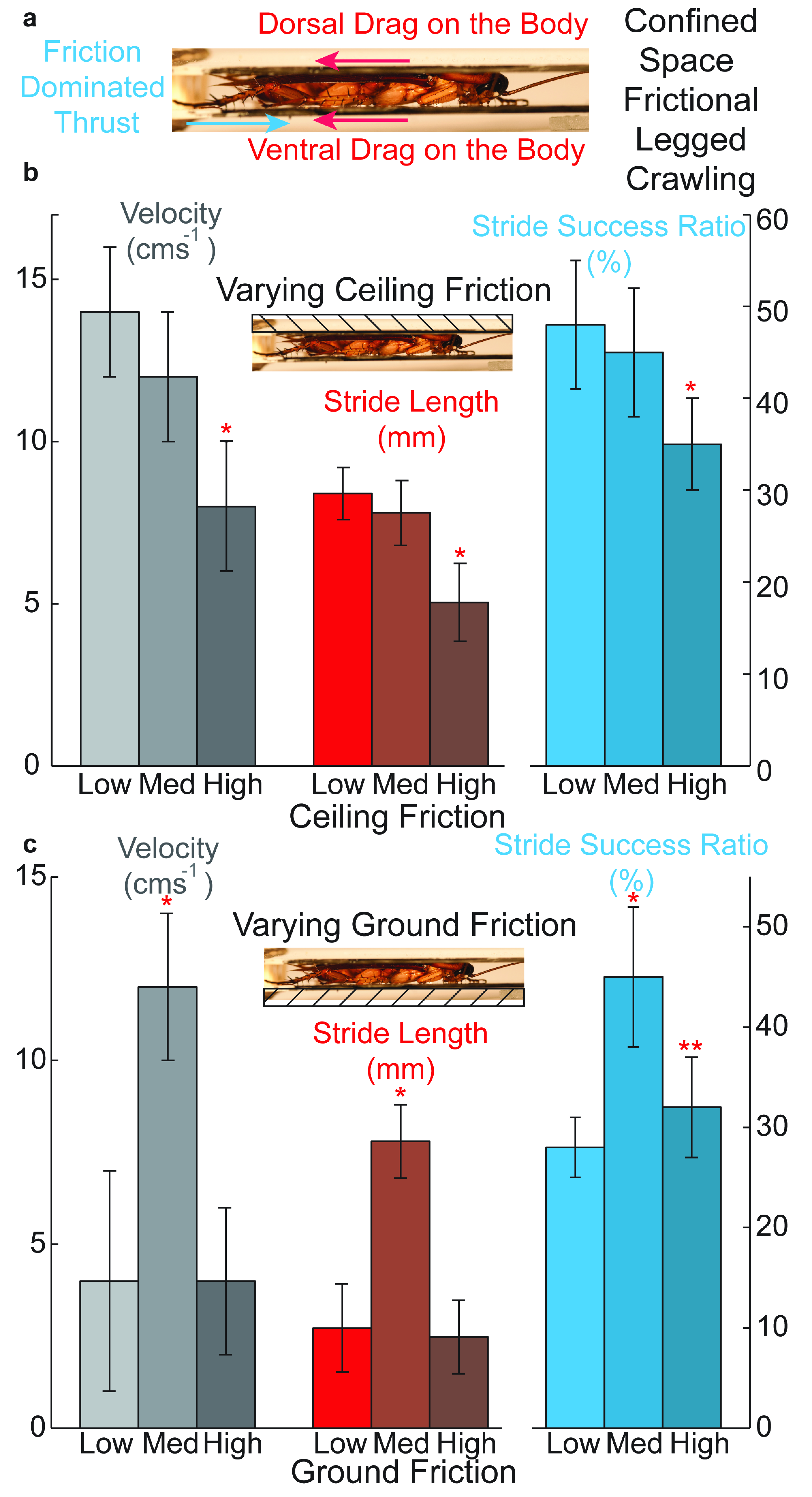
A side view of an American cockroach, P. americana, crawling in a confined space at 12, 9, 6 and 4 mm crevice heights. Playback sequences are real-time and 20× slowed.
Supplementary Movie 3 Full_Video_s3
A side view of an American cockroach, P. americana, undergoing a compression materials test in a specially constructed apparatus attached to a materials testing machine. Playback of compression sequences are real-time while the recovery sequence is 20x faster.
Supplementary Movie 4 Full_Video_s4
A demonstration of the compliance of our robot’s shell, passive sprawling mechanism of flexible spine and a side view of our robot prototype running unrestricted and crawling in a confined space at 35 mm crevice height. Playback sequences are as indicated in video.
Compilation Video of All 4 Movies from Paper Full_Video _compilation
Additional Images
Please click on an image to view the full-resolution version.

A lone cockroach squeezing through a 3 mm crevice under room door. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

Three cockroaches squeezing though a 3 mm crevice under a room door at different stages of traversal. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

Two similarly sized adult cockroaches, one standing and the other emerging from a vertically confined space between two flat plates 4 mm apart. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

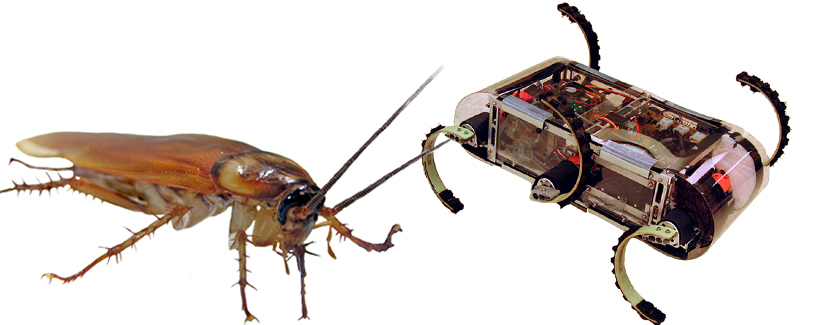
The compressible robot, CRAM with a complaint, yet tough cockroach. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

The compressible robot, CRAM with a complaint, yet tough cockroach. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

The compressible robot, CRAM with a complaint, yet tough cockroach. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.

Cockroach about to be stepped on by a boot. Photo Credit Tom Libby, Kaushik Jayaram and Pauline Jennings. Courtesy of PolyPEDAL Lab UC Berkeley.
Contact Information for Comments on Article
Professor Daniel I. Goldman (physics of animal locomotion)
School of Physics
837 State Street NW
Georgia Institute of Technology
Atlanta, GA 30332-0430
Phone: 404-894-0993
email: daniel.goldman@physics.gatech.edu
Professor Robin R. Murphy (emergency response specialist)
Raytheon Professor of Computer Science & Engineering
Director, Center for Robot-Assisted Search and Rescue
Director, Center for Emergency Informatics / Emergency Informatics EDGE
Texas A&M University
Phone: 1-979-845-8737
http://faculty.cse.tamu.edu/murphy/
email: murphy@cs.tamu.edu
Professor David Hu (physics of animal locomotion and bio-inspired robots)
Department of Mechanical Engineering and Biology
Georgia Institute of Technology
Love 007
Phone: 404.894.0573
email: hu@me.gatech.edu
Professor Noah J. Cowan (bioinspired robots and control)
Department of Mechanical Engineering
Johns Hopkins University
Phone: 410-516-5301
email: ncowan@jhu.edu
Professor Robert Wood (bio-inspired soft robots)
School of Engineering & Applied Sciences
Harvard University
Phone: 617-496-1341
email: rjwood@seas.harvard.edu
Professor Sangbae Kim (bio-inspired soft robots)
Department of Mechanical Engineering
Massachusetts Institute of Technology
77 Massachusetts Avenue
Cambridge MA 02139-4307
Phone: 617-452-2711
email: sangbae@mit.edu
Senior Lecturer Walter Federle (insect biomechanics)
Department of Zoology
University of Cambridge
Downing Street
Cambridge
CB2 3EJ
Phone: +44 (0)1223 763435
email: wf222@cam.ac.uk
Professor Stacey Combes (insect biomechanics)
Department of Organismic & Evolutionary Biology
552B MCZ Concord Field Station
Harvard University
Old Causeway Road
Bedford, MA 01730
Phone: 781-275-1725
e-mail: scombes@oeb.harvard.edu
Industry News
We are pleased to welcome Kimberly-Clark Corporation as CiBER's first Corporate Member (Platinum-level).

